Die Schrittmotorvariante überzeugt in Preis und Leistung bei flexibler Kombination der Achsen.
Durch die Kombination von seriellen und parallelkinematischen Achsen neben höchstmöglicher Präzision und Dynamik wird eine bestmögliche Flexibilität erreicht. Dieser neue Ansatz ist dadurch bei geringen Abmessungen jedem normalen Hexapod deutlich überlegen. Durch den Einsatz von Standard-Achsen ist diese Lösung auch preislich eine sehr attraktive Lösung.
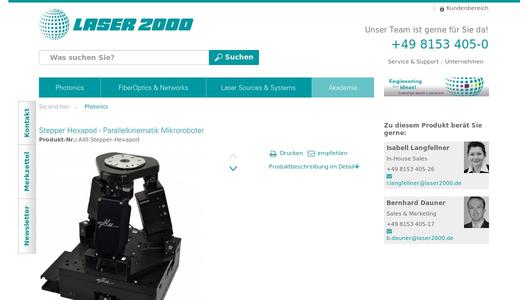
Die Systeme bestehen aus drei verschiedenen Standard-Komponenten wie XY-Achse, einem Tripod und einer Rotationsachse.
Jede Achse ist mit Schrittmotoren ausgestattet. Je nach Anwendung können diese im offen angesteuert oder geschlossenen Regelkreis betrieben werden. Als Encoder für den geschlossen Regelkreis stehen Rotations- und Linearencoder zur Verfügung.
Mit den optionalen Controllern ist es möglich eine präzise vektorielle Ansteuerung in Vorwärts- und Rückwärtsbewegung durchzuführen. Es können auch komplexe Operationen wie Pivot-Punkt-Verstellung oder eine Verschiebung des Koordinatensystems durchgeführt werden. Das teils unpräzise Bewegungsprinzip von klassischen Hexapoden kann dadurch vermieden werden.
Die XY-Verfahrwege reichen von 50 mm - 300 mm. Der Z-Hub kann von 6 mm - 106 mm gewählt werden. Die Verkippwinkel um die XY-Achse reichen von +/-3° bis +/-30° bzw. 360° um die Z-Achse. Dabei können Lasten von bis zu 15 kg bewegt werden. Auch ein Über-Kopf-Betrieb ist problemlos möglich.
Durch die Kombination von seriellen und parallelkinematischen Achsen neben höchstmöglicher Präzision und Dynamik wird eine bestmögliche Flexibilität erreicht. Dieser neue Ansatz ist dadurch bei geringen Abmessungen jedem normalen Hexapod deutlich überlegen. Durch den Einsatz von Standard-Achsen ist diese Lösung auch preislich eine sehr attraktive Lösung.
Die Systeme bestehen aus drei verschiedenen Standard-Komponenten wie XY-Achse, einem Tripod und einer Rotationsachse.
Jede Achse ist mit Schrittmotoren ausgestattet. Je nach Anwendung können diese im offen angesteuert oder geschlossenen Regelkreis betrieben werden. Als Encoder für den geschlossen Regelkreis stehen Rotations- und Linearencoder zur Verfügung.
Mit den optionalen Controllern ist es möglich eine präzise vektorielle Ansteuerung in Vorwärts- und Rückwärtsbewegung durchzuführen. Es können auch komplexe Operationen wie Pivot-Punkt-Verstellung oder eine Verschiebung des Koordinatensystems durchgeführt werden. Das teils unpräzise Bewegungsprinzip von klassischen Hexapoden kann dadurch vermieden werden.
Die XY-Verfahrwege reichen von 50 mm - 300 mm. Der Z-Hub kann von 6 mm - 106 mm gewählt werden. Die Verkippwinkel um die XY-Achse reichen von +/-3° bis +/-30° bzw. 360° um die Z-Achse. Dabei können Lasten von bis zu 15 kg bewegt werden. Auch ein Über-Kopf-Betrieb ist problemlos möglich.